Our robots
Let us understand how our vehicles work using the four steps below.
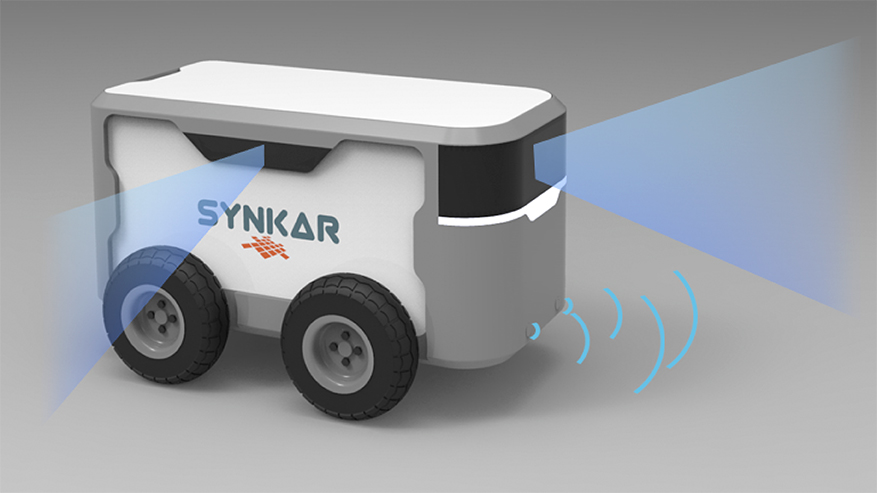
1. Sensing:
Our robots are designed with several cameras, radars and ultrasonic sensors to collect information about the environment.
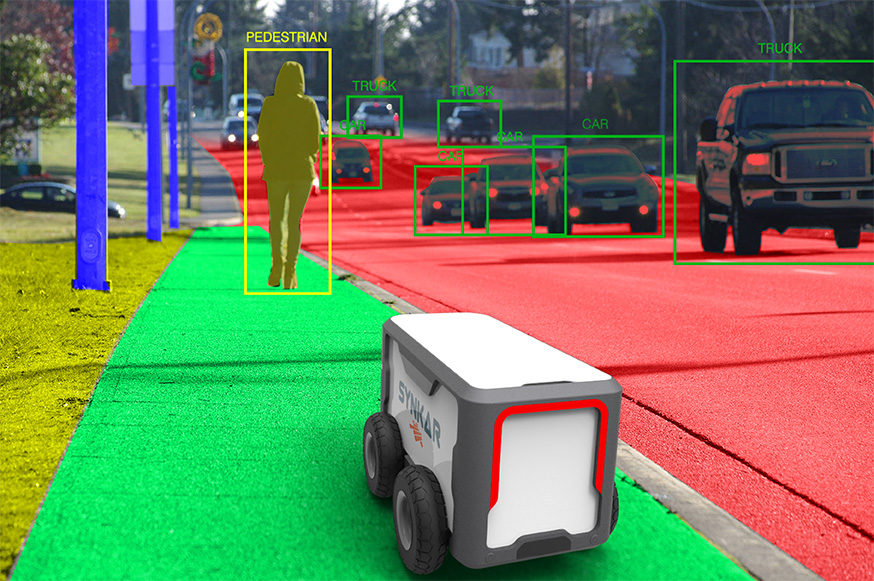
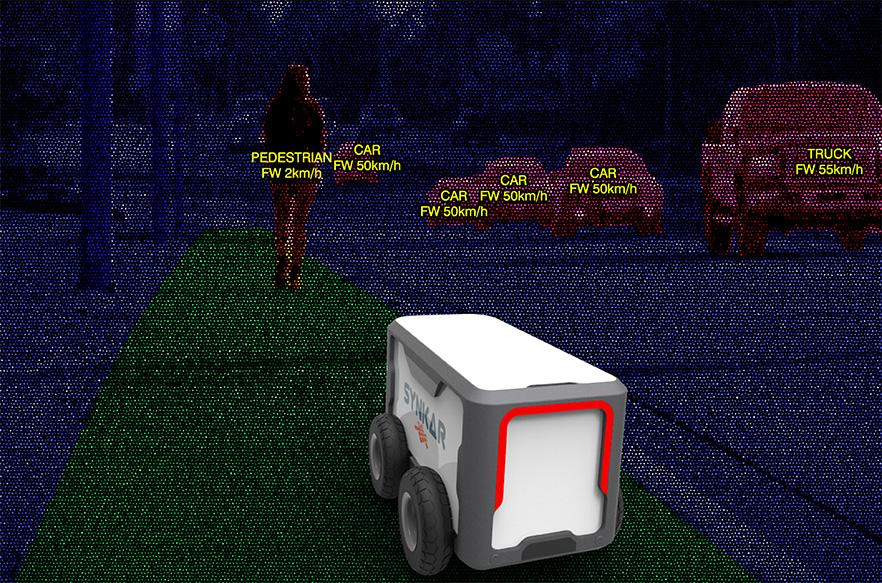
2. Perception:
The Perception Stack does semantic segmentation, object detection and depth estimation. As a result we obtain a highly detailed understanding of the vehicle's surroundings.
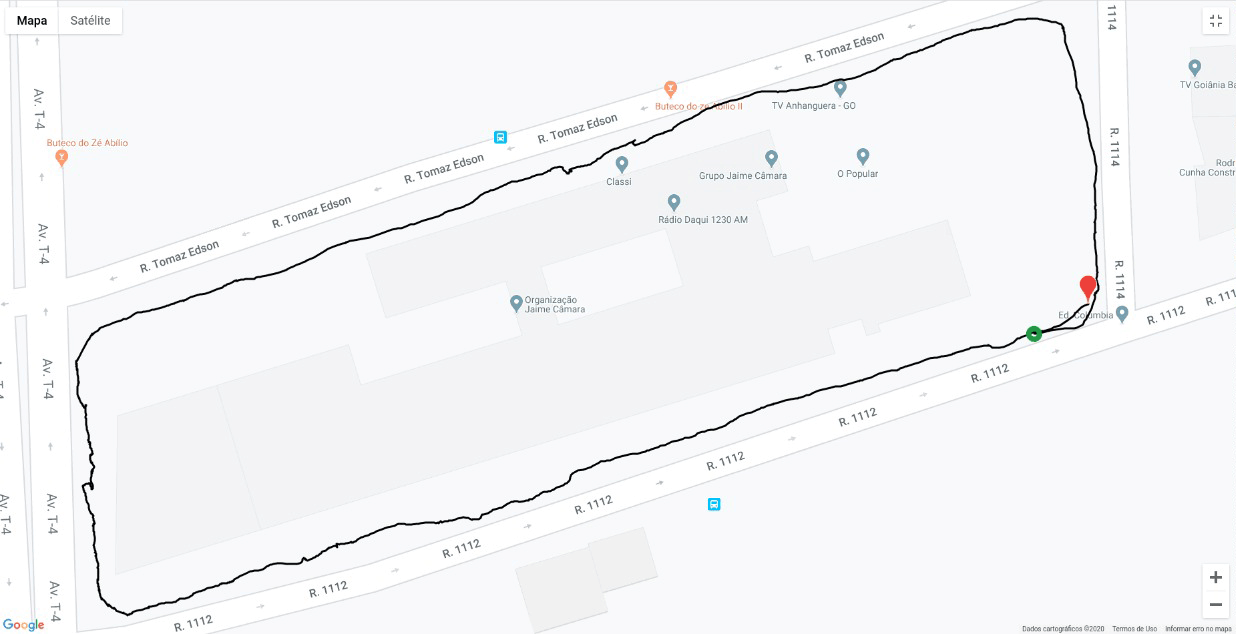
3. Mapping and Localization:
On the set up phase, the Mapping Stack uses the perception information to generate a multilayered map of the environment, indexing all relevant sensory information. During operation, the Localization Stack takes over, using the saved map to improve the understanding of the robot’s position.
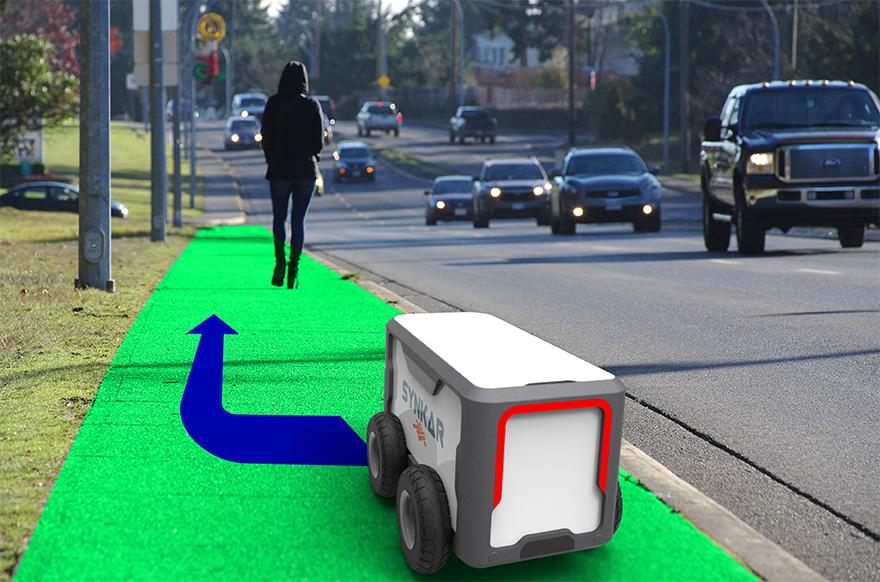
4. Navigation:
Finally, the results of the before steps are combined to create a virtual model of the world. Our robots use that to plan their routes and react to people, vehicles, and obstacles on the environment.